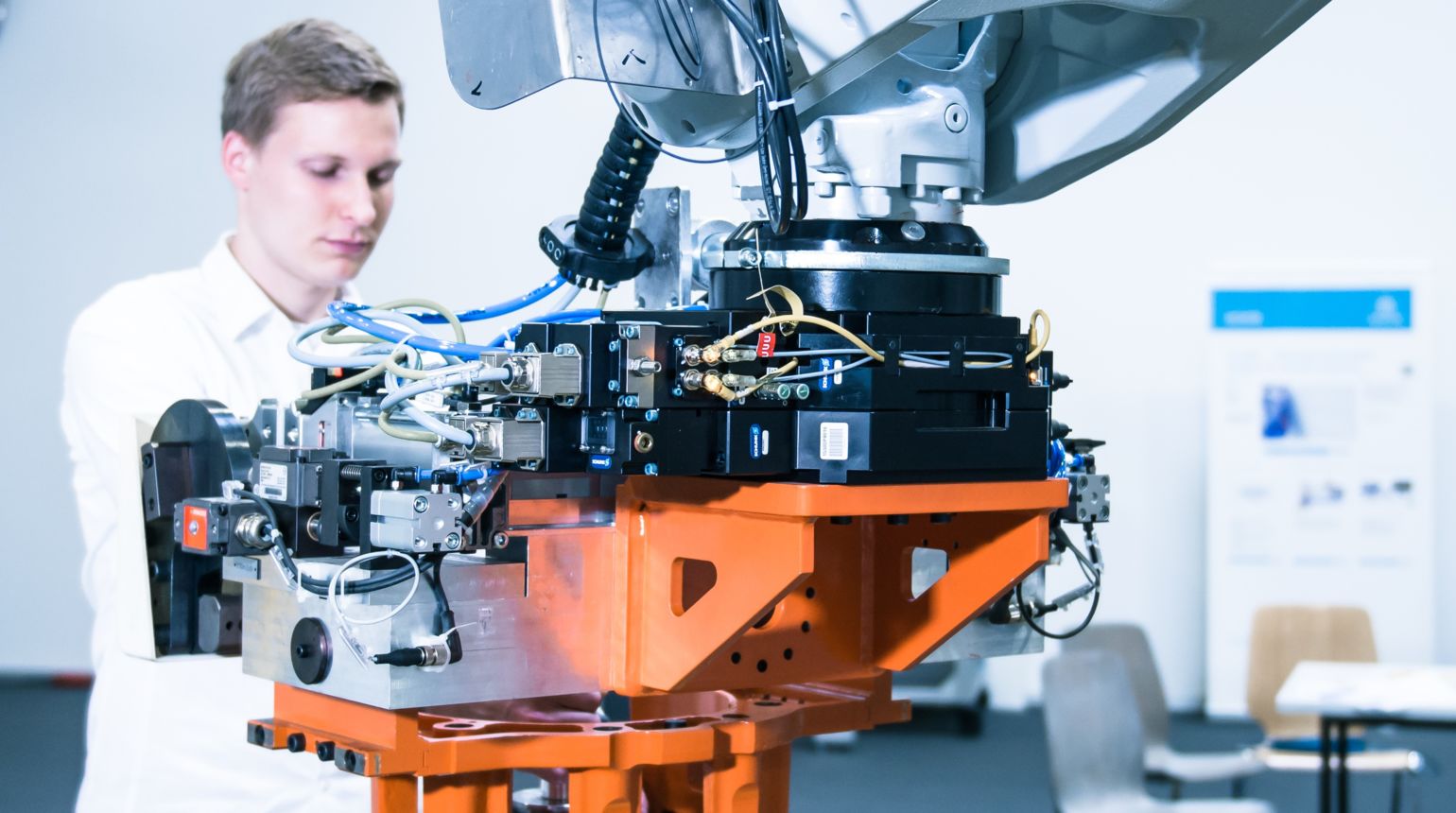
Together with thyssenkrupp, Mayser has developed an innovative tool safety for cobot applications in aggregate assembly.
The efficient and safe cooperation of human and robot is now possible – thanks to the development of the failsafe Ultrasonic safety of Mayser. It is the only ultrasonic sensor worldwide that is approved for personal safety according to ISO 13849-1:2015, Category 3 PL d. A lightweight robot has now been equipped with the safe ultrasound together with thyssenkrupp System Engineering. It reliably protects the human from the effector in the collaboration with the robot.


In addition to the programmable logic controller (PLC), industrial robots have been an important aid for automatic or semi-automatic processes in production-line assembly for approximately 40 years. However – even today – full automation of assembly is not always useful or possible. On the one hand there are tasks that are simply too complex to automate with economically reasonable effort. On the other hand, humans are still unbeatable when it comes to activities requiring high flexibility, mobility and intuition.
Mayser and thyssenkrupp System Engineering have set out to develop solutions for human-robot-collaboration that combine the strengths of humans and the strengths of robots. This results in new processes for aggregate assembly, as well as many other applications areas that not only improve ergonomics and increase (variant) flexibility, they also lower costs and permit compliance with the cycle time.
Conventional automation solutions require strict spatial and time separation of humans and machines. In this regard, process steps must be executed sequentially, or components, such as safety technology and feeds cause additional costs. Approaches permitting humans and robots to work on the same object without safety guards already exist, but often only with humans and robots working alongside each other and not really working together.
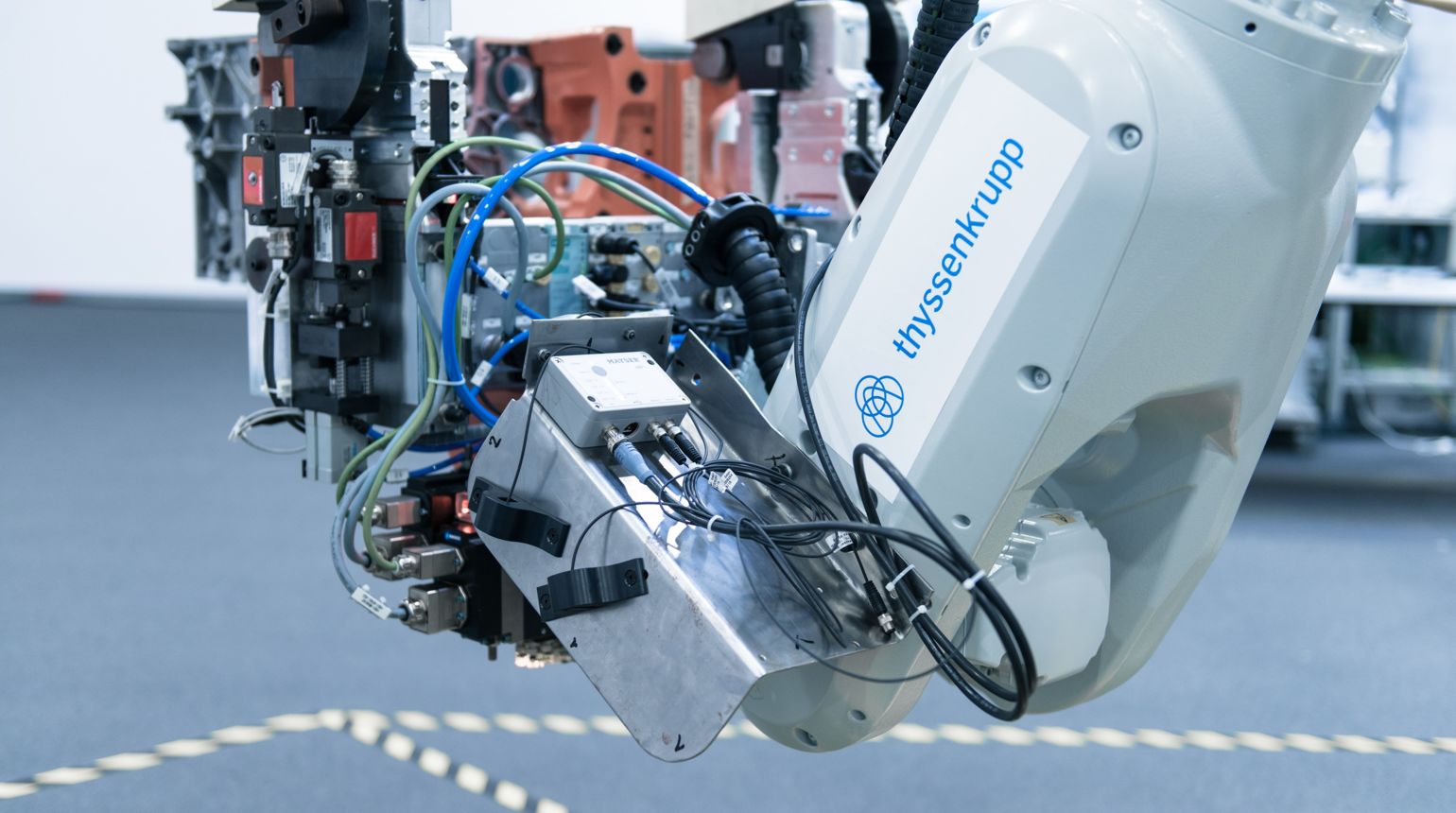
Lightweight robots make it possible to equip typical manual workstations with robotics. In this regard, the collaboration ability of peripheral equipment, for example, of the effector, must meet the requirements of a safe human-robot collaboration. Since the tool geometry and the component can generally not be influenced, the problem-solving approach consists of securing the tool with a virtual protective shell in the form of a sensor field. This was realised with the Ultrasonic safety of Mayser.
Detection using transducers arranged decentralised on the robot
Ultrasonic sensors are capable of non-touch detection of both humans and objects, regardless of contamination, extraneous noise, air flows and moisture. Mayser ultrasonic systems feature two miniature ultrasonic transducers, which are designed for versatile positioning directly on the robot arm or gripper, independently from the electronics. The sensors take measurements in an elliptical sound field and detect even the smallest objects. A teach-in function additionally allows the system to learn the complete measuring environment as a standard environment. This enables the system to respond only to deviations from the target state.
The transducers of the Ultrasonic safety each establish a sound field around the effector, which is divided into a warning area and a protection area. The maximum measurement distance in the warning field is 250 cm. When the robot enters the warning field, it is braked in a manner that is easy on the drive. If a person is detected in the protection field, which has a maximum measurent distance of 200 cm, the robot is stopped – a collision with the person is prevented. When the end effector approaches the workpiece, the robot returns to the safe speed and the protection field is deactivated. This enables stopping of the robot in due time before a collision with a person without exceeding the permissible forces and pressures. One transducer already complies, through the protection fields, with the criteria for the approval according to ISO 13849-1:2015 Category 3 PL d for personal safety. The lightweight robot for assembly at thyssenkrupp was equipped with four transducers, as this is needed for the effector geometry. The ultrasonic sensors are parameterized via a graphic interface that can be installed on a computer. The Ultrasonic safety is connected via USB.

